

Dry Fogging Technology Vs. COVID-19
March 21, 2020Intelligent telepresence Robot SIFROBOT-1.0 Overview
April 27, 2020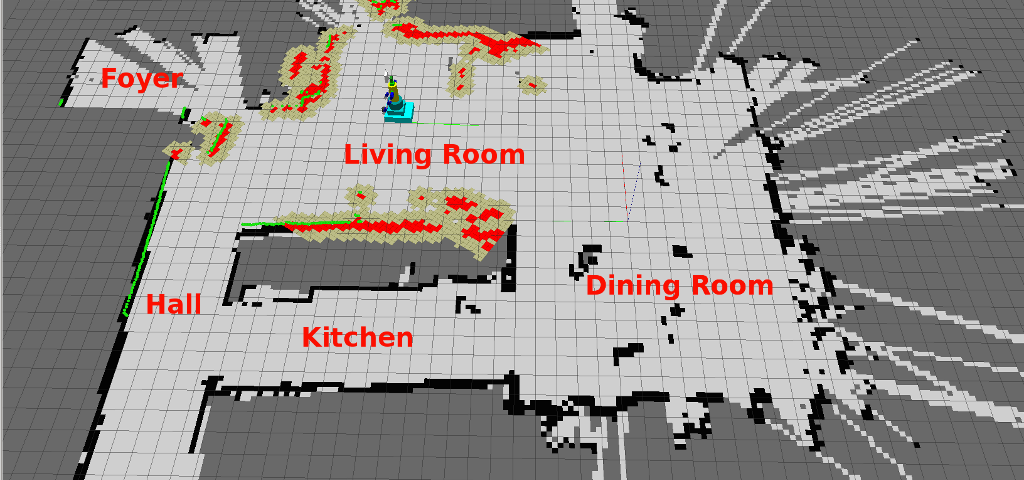
Simultaneous Localization and Mapping ( SLAM) has been the subject of technical research for many years. It is the process of collecting data from the physical world, with the help of numerous sensors installed in the robot.
SLAM algorithms allow the Robot to map out unknown environments. Engineers use the map information to carry out tasks such as path planning and obstacle avoidance.
Moreover, while navigating the environment, the robot seeks to acquire a map thereof, and at the same time, it wishes to localize itself using its map.
For instance, Consider a home robot without SLAM, it will just move randomly and may not be able to clean (the entire floor surface) or serve. Besides, this approach uses excessive power, so the battery will run out more quickly.
On the other hand, robots with SLAM can use information such as the number of wheel revolutions and data from cameras and other imaging sensors to determine the amount of movement needed. This is called localization.
The robot can also simultaneously use the camera and other sensors to create a map of the obstacles in its surroundings and avoid cleaning the same area twice. This is called mapping.
In other words, a SLAM robot uses its sensors (Sonor, laser, or cameras) to map the environment while figuring out its own location.
SLAM is useful in many other applications such as navigating a fleet of mobile robots to arrange shelves in a warehouse, parking a self-driving car in an empty spot, or delivering a package by navigating a drone in an unknown environment.
The popularity of the SLAM problem is correlated with the emergence of indoor mobile robotics. The use of GPS has no room to bound the localization error for indoor usages, such as Disinfection, Telepresence, Health-care, Educational, and Business Robots.
Additionally, SLAM offers an appealing alternative to user-built maps, showing that robot operation is approachable even in the absence of a purpose specification localization infrastructure.
To conclude, Simultaneous localization and mapping (SLAM) is the key technology to fulfill mobile robot obstacle avoidance and autonomous navigation.
References: Simultaneous Localization and Mapping, What You Need to Know About SLAM,
[launchpad_feedback]
Disclaimer: The information provided in this article are for explanatory purposes only. SIFSOF is not responsible neither for the misuse nor for the wrong or random use of the robots.